|
|
Red-Teaming Vision-Language-Action Models via Quality Diversity Prompt Generation for Robust Robot Policies
Siddharth Srikanth,
Freddie Liang,
Ya-Chuan Hsu,
Varun Bhatt,
Shihan Zhao,
Henry Chen,
Bryon Tjanaka,
Minjune Hwang,
Akanksha Saran,
Daniel Seita*,
Aaquib Tabrez*,
Stefanos Nikolaidis*
In Submission
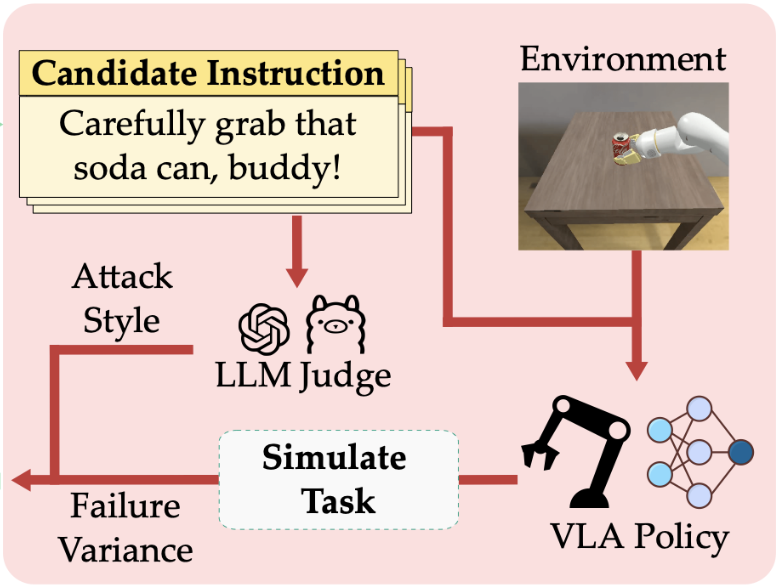
We introduce Q-DIG, a novel red-teaming framework for generating diverse task instructions that induce failures in SoTA Vision-Language-Action (VLA) models using Quality Diversity (QD). We then provide a methodology to leverage these failure modes to improve policies.
|
|
|
Timing the Message: Language-Based Notifications for Time-Critical Assistive Settings
Ya-Chuan Hsu,
Jonathan DeCastro,
Andrew Silva,
Guy Rosman
Oral presentation at AAMAS, 2026
arXiv
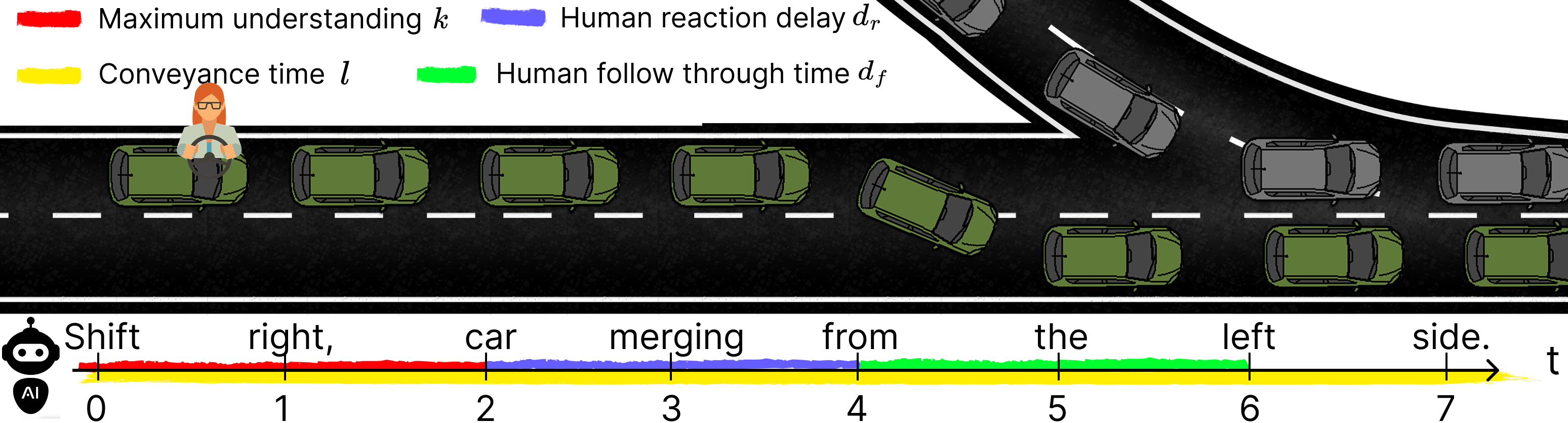
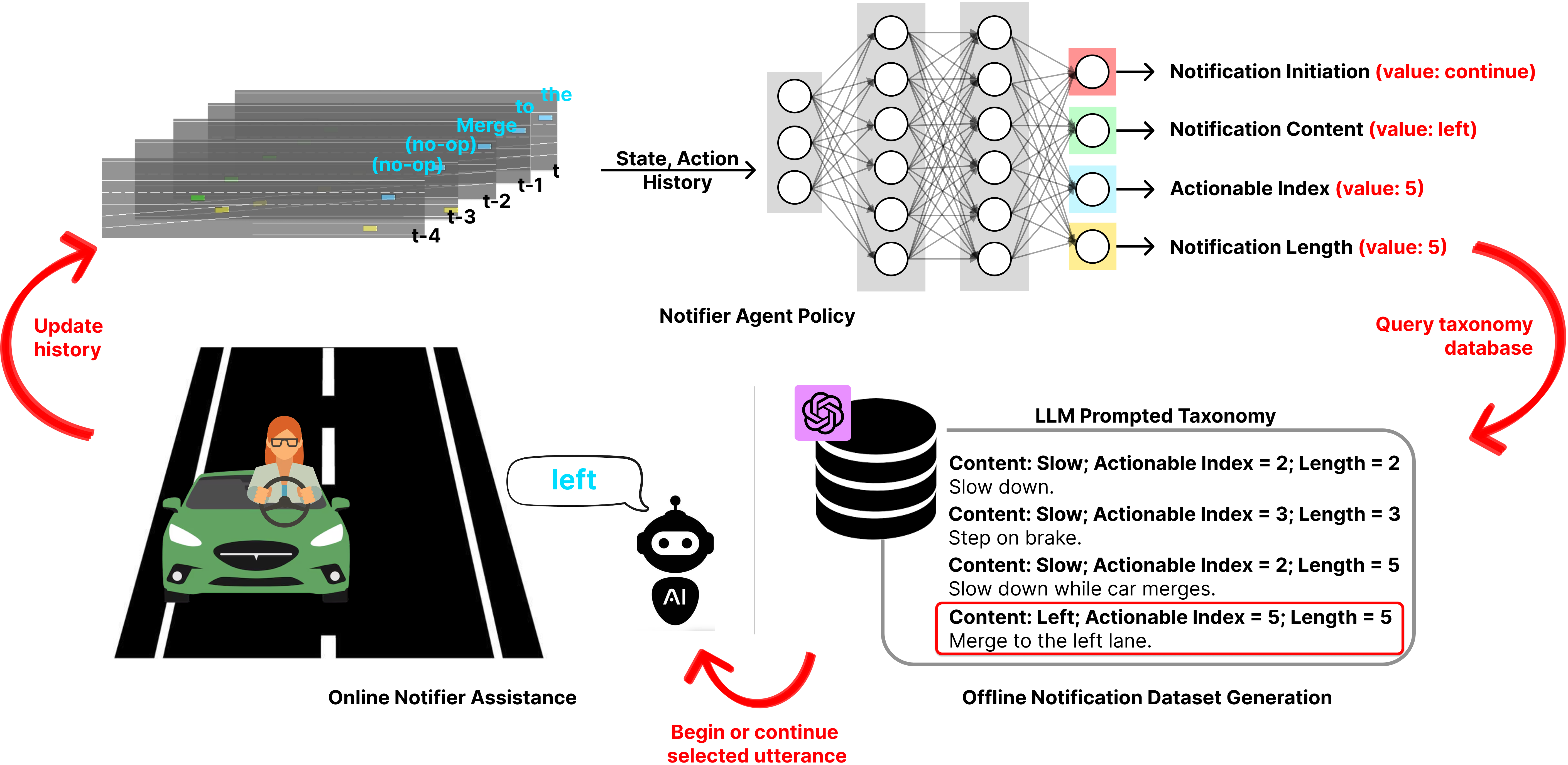
In time-critical settings (e.g., assistive driving), alerts or haptics grab attention but force users to interpret and act, adding delay. Language-based assistants can give context-grounded instructions, yet most methods optimize what to say while ignoring when to say it—overlooking speech duration, human comprehension, and follow-through time. We cast this timeliness–informativeness trade-off as an augmented-state MDP and propose an RL framework with a scalable, LLM-generated taxonomy dataset.
|
|
|
Semantic Encoders Enable Robust Communication-Aware Reinforcement Learning Policies
Siddharth Srikanth,
Varun Bhatt,
Darius Mahjoob,
Ya-Chuan Hsu,
Aaquib Tabrez,
Stefanos Nikolaidis
Tom4AI at AAAI 2026
Paper
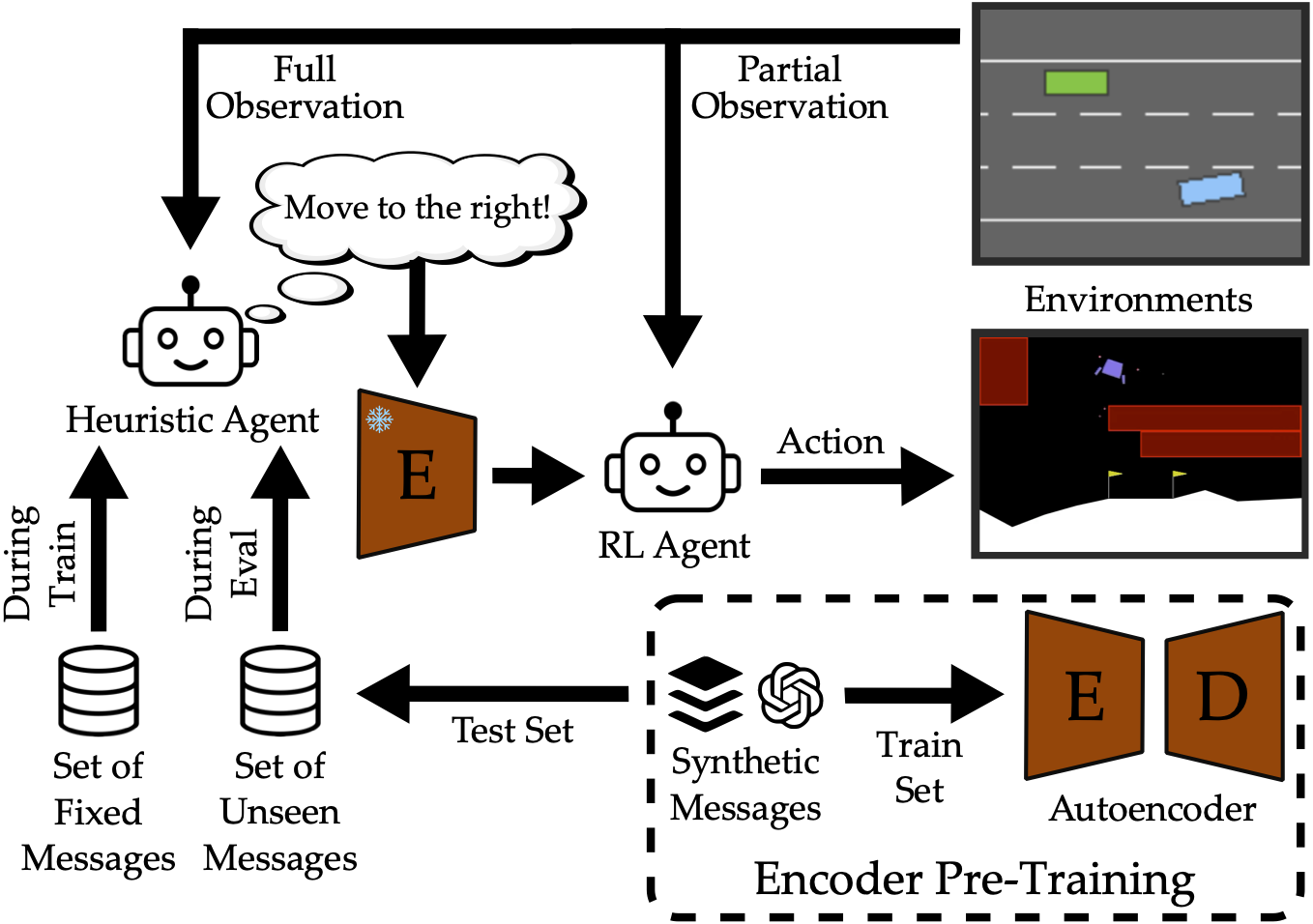
We present a framework for training RL agents that understand natural language messages and adapt to unseen messages during evaluation.
|
|
|
Integrating Field of View in Human-Aware Collaborative Planning
Ya-Chuan Hsu,
Michael Defranco,
Rutvik Patel,
Stefanos Nikolaidis
ICRA, 2025
Paper |
Code
This paper integrates human field-of-view (FOV) limitations into robot planning by adapting to the evolving subtask intent of humans based on their limited perception. To manage the resulting computational complexity, we propose a hierarchical online planner. In a steakhouse domain study, our FOV-aware planner reduced human interruptions and redundant actions. We further demonstrate our planner in a virtual reality kitchen environment.
|
|
|
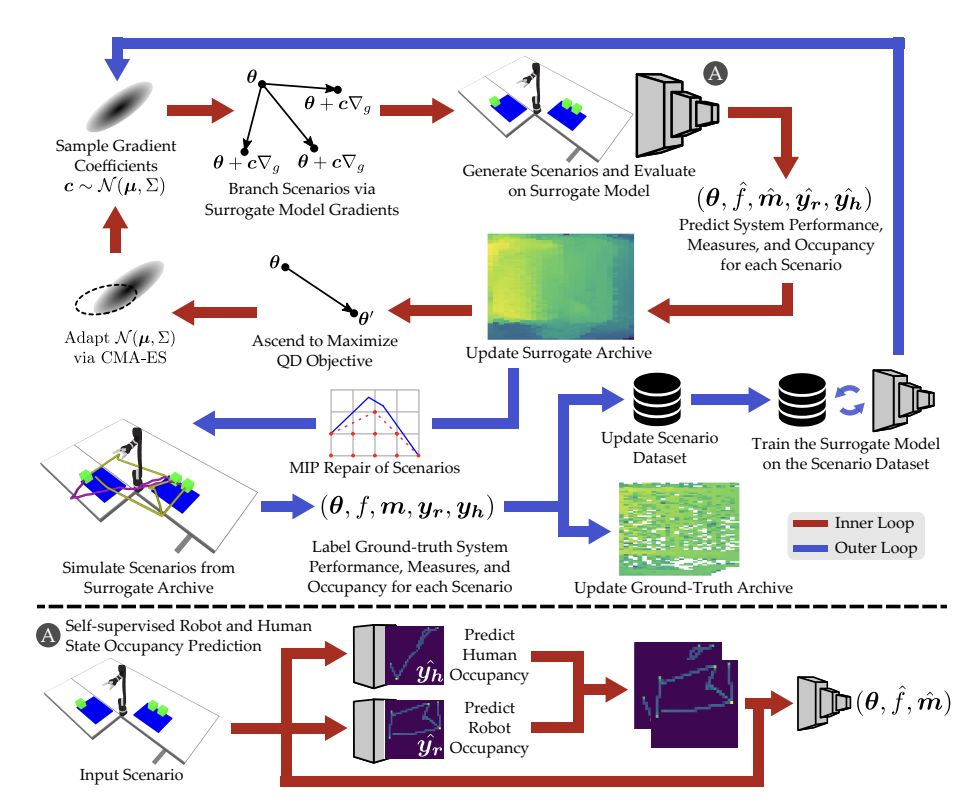
Surrogate Assisted Generation of Human-Robot Interaction Scenarios
Varun Bhatt,
Heramb Nemlekar,
Matthew C. Fontaine,
Bryon Tjanaka,
Hejia Zhang,
Ya-Chuan Hsu,
Stefanos Nikolaidis
CoRL, 2023
arXiv
We propose using surrogate models to efficiently generate diverse and reproducible failure scenarios in human-robot interaction tasks, reducing the computational cost of traditional simulation-based methods.
|
|
|
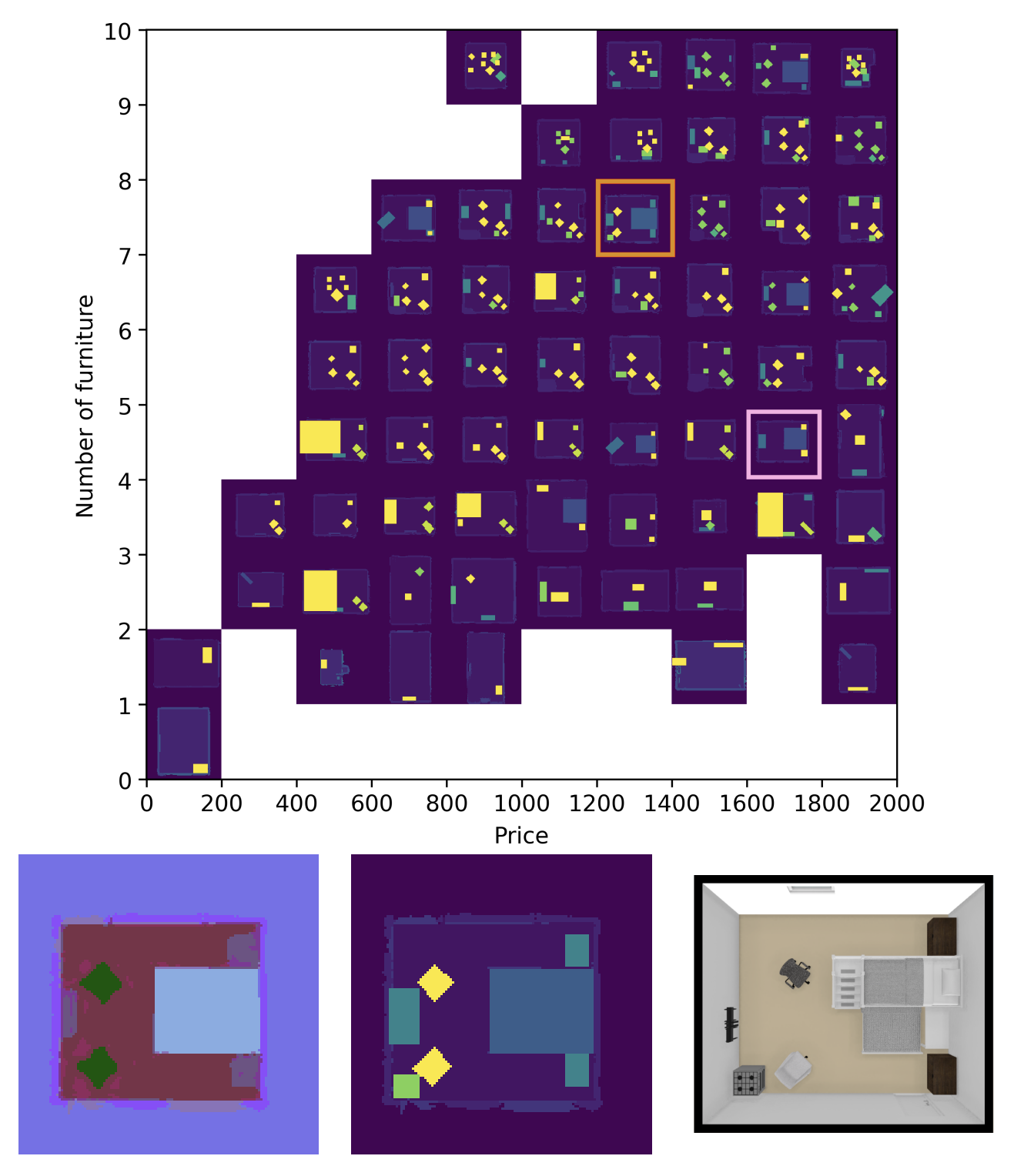
Generating diverse indoor furniture arrangements
Ya-Chuan Hsu,
Matthew C. Fontaine,
Sam Earle,
Maria Edwards,
Julian Togelius,
Stefanos Nikolaidis
SIGGRAPH Poster, 2022
arXiv
We propose a method using GANs and a quality diversity algorithm to generate realistic and diverse indoor furniture arrangements, varying in attributes like price and number of pieces.
|
|
|
On the Importance of Environments in Human-Robot Coordination
Matthew C. Fontaine*,
Ya-Chuan Hsu*,
Yulun Zhang*,
Bryon Tjanaka,
Stefanos Nikolaidis
RSS, 2021
Project Page
/
arXiv
Research on human-robot collaboration often focuses on robot policies for fluent teamwork, overlooking the impact of the environment on coordination. We propose a framework for procedurally generating environments that are stylistically human-like, solvable by human-robot teams, and diverse in coordination behaviors.
|
|
|
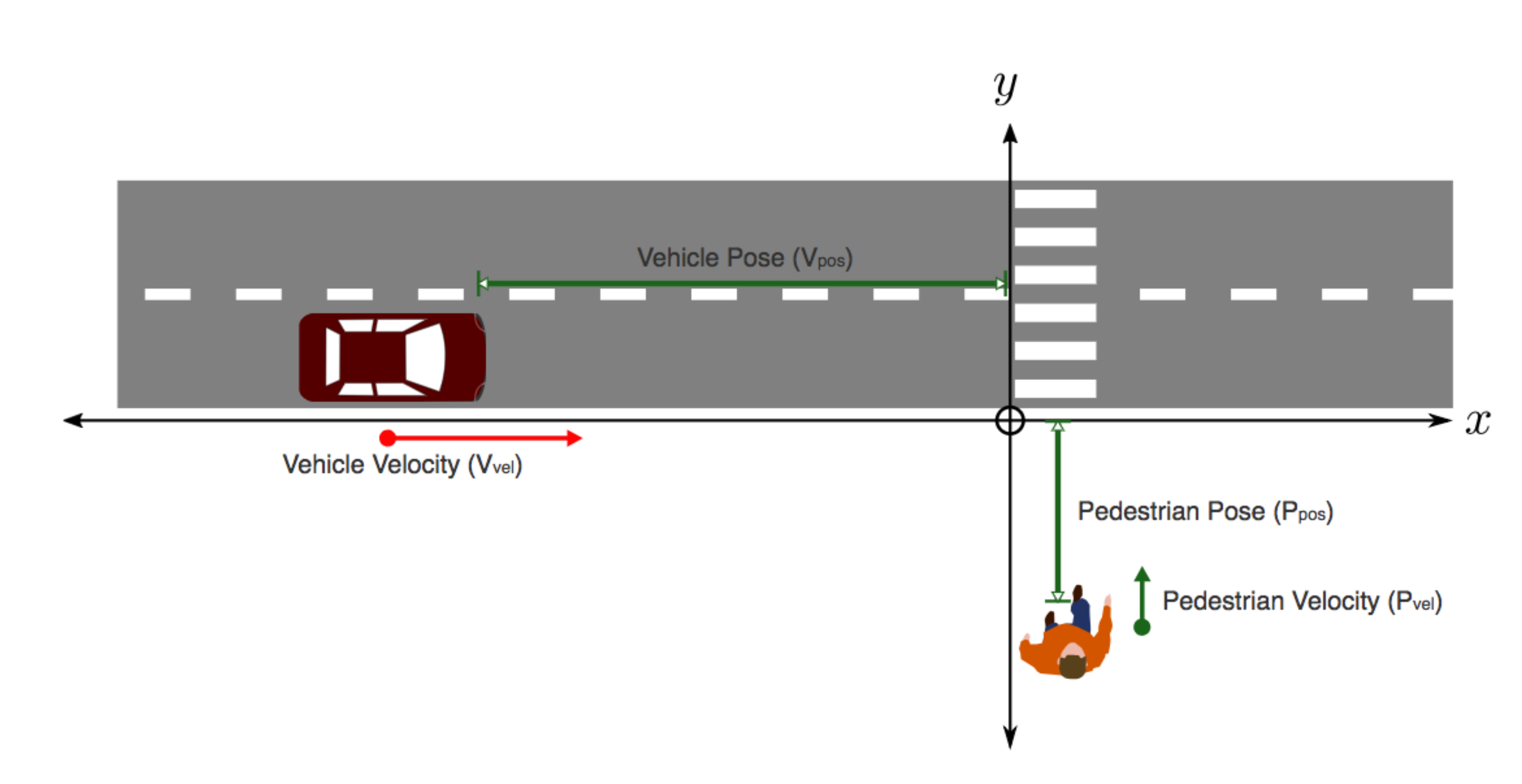
A POMDP Treatment of Vehicle-Pedestrian Interaction: Implicit Coordination via Uncertainty-Aware Planning
Ya-Chuan Hsu,
Swaminathan Gopalswamy,
Srikanth Saripalli,
Dylan A Shell
IROS, 2020
Paper
This paper tackles the challenge of resolving ambiguous traffic situations where autonomous vehicles cannot directly communicate intent. It proposes a model using a partially observable Markov decision process (POMDP) to produce changes in speed to express intent. The approach is validated in a simulated vehicle-pedestrian crossing and tested in real-world trials with a self-driving car, demonstrating safe and efficient navigation.
|
|
|
An MDP model of vehicle-pedestrian interaction at an unsignalized intersection
Ya-Chuan Hsu,
Swaminathan Gopalswamy,
Srikanth Saripalli,
Dylan A Shell
VTC-Fall, 2018
Paper
This paper is a preliminary study on communication between pedestrians and autonomous vehicles at unsignalized intersections. We propose a decision-theoretic model, using an MDP framework inspired by psychological studies, to represent pedestrian-vehicle interactions.
|
Service
Serving as a PhD mentor for the Women in Engineering (WiE) at USC.
Serving/Served as a reviewer for AURO 2026, AAAI 2026, HRI 2026, CORL 2025, THRI 2025, ICRA 2025, HRI 2025, THRI 2024, THRI 2023, HRI 2022 (LBR), THRI 2021, HRI 2021, RSS 2021
|
Teaching
CSCI 545: Introduction to Robotics (Master's Level) - Fall 2021, 2023, 2024
CSCI 641/699: Computational Human-Robot interaction (PhD Level) - Spring 2023, 2024
CSCI 170: Discrete Methods in Computer Science (Undergrad Level) - Spring 2021
|
|